ESP CP2102 driver yükleme CP210x Universal Windows Driver yüklemek için dosyayı indirin.
ESP CP2102 driver yükleme CP210x Universal Windows Driver İndir







ESP CP2102 driver yükleme CP210x Universal Windows Driver yüklemek için dosyayı indirin.
ESP CP2102 driver yükleme CP210x Universal Windows Driver İndir

3D printerlar için kullanılan Cura dilimleme yazılımına Sapphire Plus modelini eklemek için aşağıdaki zip dosyasını indiriniz ve cura klasörünün içerisine kopyalayınız. Cura yı tekrar açtığınızda printer ekleme menüsünde Two Trees altında Sapphire Plus ı göreceksiniz.



Bu en yeni çizim robotu, basit ve açık kaynaklı bir yazılım (EleksCAM, Inkscape) tarafından kontrol edilir. Neredeyse tüm düz yüzeylerde çok çeşitli günlük ve uzman çizim ve yazma ihtiyaçlarına hizmet etmek için tasarlanmış son derece çok yönlü bir makinedir. Bilgisayarınızı kullanarak el yapımı gibi görünen, gerçek bir kalem (mürekkep püskürtmeli veya lazer yazıcı yerine) kullanmanın kusursuz görünümü ile tamamlanmış bir yazı üretmenizi sağlar.
Kurulum ve kullanım talimatı eklenmiştir.
Robot Parçaları
Drawing Robot Kalem ile Çizim Robotu
https://www.robotparcalari.com/embed/#?secret=1qwCpfHiaL
Bu kullanım kılavuzu https://www.robotparcalari.com/urun/drawgin-robot-kalem-ile-cizim-robotu/ adresindeki çizim robotu içindir.
# Döküman Versiyon : 1.0
# Tarih : 09.01.2021
# GRPL Firmware : https://github.com/robottini/grbl-servo
# GRPL GUI Sender : https://github.com/Denvi/Candle/
# Inkscape : 0.48.0-1
Windows için kurulum adımları:
1- Klasör içerisindeki grbl-servo.zip dosyası Arduino library olarak eklenir. Arduino proğramı arayüzünden File -> Examples menüsünden grbl-servo içerisindeki grblUpload dosyası açılır. Arduino Port numarası seçilir ve Arduino kart ismi Arduino Uno olarak seçilir ve firmware Arduino kartımıza yüklenir.
2- Klasör içerisindeki Candle_1.1.7.zip dosyası klasöre açılır ve içerisindeki Candle.exe dosyası çalıştırılır. Service -> Settings menüsünden Arduino port numarası seçilir. Ok tuşu ile ana ekrana dönülür.
3- GRBL dosyasının standart ayarları görmek için console veri girişinden $$ komutu verilir. Standart ayarlar aşağıdaki gibidir.
Grbl 0.9i içindir.
a- $0=10 (step pulse, usec)
b- $1=25 (step idle delay, msec)
c- $2=0 (step port invert mask:00000000)
d- $3=0 (dir port invert mask:00000000)
e- $4=0 (step enable invert, bool)
f- $5=0 (limit pins invert, bool)
g- $6=0 (probe pin invert, bool)
h- $10=3 (status report mask:00000011)
i- $11=0.010 (junction deviation, mm)
j- $12=0.002 (arc tolerance, mm)
k- $13=0 (report inches, bool)
l- $20=0 (soft limits, bool)
m- $21=0 (hard limits, bool)
n- $22=0 (homing cycle, bool)
o- $23=0 (homing dir invert mask:00000000)
p- $24=25.000 (homing feed, mm/min)
r- $25=500.000 (homing seek, mm/min)
s- $26=250 (homing debounce, msec)
t- $27=1.000 (homing pull-off, mm)
u- $100=250.000 (x, step/mm)
v- $101=250.000 (y, step/mm)
y- $102=250.000 (z, step/mm)
z- $110=500.000 (x max rate, mm/min)
aa- $111=500.000 (y max rate, mm/min)
ab- $112=500.000 (z max rate, mm/min)
ac- $120=10.000 (x accel, mm/sec^2)
ad- $121=10.000 (y accel, mm/sec^2)
ae- $122=10.000 (z accel, mm/sec^2)
af- $130=200.000 (x max travel, mm)
ag- $131=200.000 (y max travel, mm)
ah- $132=200.000 (z max travel, mm)
4- Drawing Robotumuzun çalışma ayarları ise aşağıdaki gibi olmalıdır. Bunun için console veri girişinden aşağıdaki komutlar çalıştırılır. Bu komutlar bir kere çalıştırıldığında ve robotunuzu kapatıp açtığınızda tekrar yapmanıza gerek yoktur. Ayarlar Arduino Uno kartınız tarafından kaydedilmektedir. Aşağıdaki komutlar çalıştırılıp bitirildikten sonra yine $$ komutu ile doğru olduğu test edilmelidir.
Grbl 0.9i içindir.
a- $0=30 (step pulse, usec)
b- $1=25 (step idle delay, msec)
c- $2=0 (step port invert mask:00000000)
d- $3=3 (dir port invert mask:00000011)
e- $4=0 (step enable invert, bool)
f- $5=0 (limit pins invert, bool)
g- $6=0 (probe pin invert, bool)
h- $10=3 (status report mask:00000011)
i- $11=0.010 (junction deviation, mm)
j- $12=0.002 (arc tolerance, mm)
k- $13=0 (report inches, bool)
l- $20=0 (soft limits, bool)
m- $21=0 (hard limits, bool)
n- $22=0 (homing cycle, bool)
o- $23=0 (homing dir invert mask:00000000)
p- $24=25.000 (homing feed, mm/min)
r- $25=500.000 (homing seek, mm/min)
s- $26=250 (homing debounce, msec)
t- $27=1.000 (homing pull-off, mm)
u- $100=80.000 (x, step/mm)
v- $101=80.000 (y, step/mm)
y- $102=10.000 (z, step/mm)
z- $110=5000.000 (x max rate, mm/min)
aa- $111=5000.000 (y max rate, mm/min)
ab- $112=500.000 (z max rate, mm/min)
ac- $120=1000.000 (x accel, mm/sec^2)
ad- $121=1000.000 (y accel, mm/sec^2)
ae- $122=10.000 (z accel, mm/sec^2)
af- $130=200.000 (x max travel, mm)
ag- $131=200.000 (y max travel, mm)
ah- $132=200.000 (z max travel, mm)
5- Klasör içerisindeki Inkscape-0.48.0-1.exe isimli programı kuruyoruz. Bizde d:\Program Files (x86)\Inkscape içerisinde kurulu.
6- laser-gcode-exporter-inkscape-plugin-master isimli zip dosyasını açıyoruz ve içerisindeki turnkeylaser.inx ve turnkeylaser.py isimli dosyaları 5. adımda kurduğumuz Inkspace klasörünün içerisindeki D:\Program Files (x86)\Inkscape\share\extensions klasörüne yapıştırıyoruz.
7- Inkscape uygulamasını çalıştırıyoruz. Döküman özellikleri menüsünden (Document Properties) Default units ayarını px olarak ayarlıyoruz. Page Size bölümünden A4 seçiyoruz ve pencereyi kapatıyoruz.
8- Bir yazı yazıp Extensions -> Export menüsünden Turnkeylaser Exporter mnüsüne tıklıyoruz, dosyamıza bir isim veriyoruz ve kaydediyoruz. Klasör adı verilmez ise masaüstüne dosyamız oluşacaktır. Klasörümüzde test-gcode isimli klasörün içerisinde örnek gcode dosyası bulunmaktadır.
9- GRPL GUI Sender Candle isimli programı açıyoruz ve Open butonu ile .gcode dosyamızı seçip gönderiyoruz.
GRPL firmware ve diğer programları buradan indirebilirsiniz.
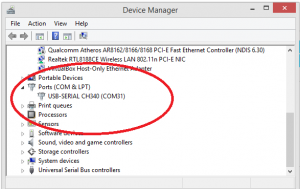
Arduino kartlarn üzerinde USB den program atabilmek ve seri porttan veri gönderebilmek için USB TTL chip bulunur. Klon Arduino larda bu çipin adı CH340 dır ve işletim sistemlerinde default olarak desteklenmez.

Örneğin; Arduino Uno, Arduino Mega veya Arduino Nano yu kullanmak için aşağıdaki driveri yüklemelisiniz.
Windows 10 üzerinde kullanmak için bu driver i yüklemeniz gerekmektedir.
Windows 10 CH340 Driver https://www.dropbox.com/s/y0scfcpfazsph2t/ch341ser.zip?dl=0
Mac OS X üzerinde kullanmak için bu driver i yüklemeniz gerekmektedir.
Mac OS X CH340 Driver
https://www.dropbox.com/s/3jrxlgeac4mjgku/CH341SER_MAC-1.4.zip?dl=0
Meşe Bilişim Yazılım Mekatronik Eğitim İthalat İhracat Sanayi ve Ticaret Limited Şirketi olarak kurulduğumuz günden beri büyük önem verdiğimiz Kişisel Verilerin Korunması ile ilgili olarak çalışmalarımızı, “Kişisel Verilerin Korunması Kanunu (KVKK)” ile paralel bir yaklaşımla yürütmeye devam ediyoruz. Bu kapsamda hem kanunda ifade edilen bazı terimler hem de yükümlülüklerimizi yerine getirmek üzere veri işleme süreçlerimiz hakkında bilgilendirmeler aşağıda sunulmuştur.
KVKK Nedir?
Kişisel Verilerin Korunması Kanunu (KVKK) 24.03.2016 ‘da Türkiye Büyük Millet Meclisi’nde kabul edilmiş ve 07.04.2016 tarihli ve 29677 sayılı Resmi Gazete’de yayınlanarak yürürlüğe girmiştir. Kanun, kişisel verilerin gizliliğinin sağlanması, korunması ve izinsiz kullanımının önüne geçilmesi gibi temel amaçlar çerçevesinde tüm veri işleyen kişi ve kurumların uyumluluğunu esas almıştır. Şirketimiz de, tüm kuruluşlar gibi bu Kanuna uymakla yükümlüdür ve Şirketimizin tüm süreçlerinde işlenen kişisel veriler bu kapsamdadır.
Kişisel Veri Nedir?
Kişiyi doğrudan veya dolaylı olarak belirlenebilir kılan tüm veriler veya veri kümeleri kişisel veri olarak kabul edilir. İsim, soy isim, doğum yeri/tarihi, telefon numarası, özgeçmiş, fotoğraf, ses kaydı gibi direkt kişiye ait veya kişi adına oluşturulmuş tanımlayıcı bilgiler örnek olarak verilebilir.
Veri İşleme Nedir?
Kişisel veriler üzerinde gerçekleştirilen her türlü işlem “veri işleme” olarak kabul edilmektedir. Dolayısıyla, verilerin arşivlenmesi, saklanması, değiştirilmesi, yeniden düzenlenmesi, açıklanması, aktarılması, analiz edilmesi ve sınıflandırılması veri işleme kapsamına girer.
Robot Parçaları, Otomasyon Ürünleri, Kontrol Sistemleri, Elektronik ve Hobi ürünleri hepsi robotparcalari.com da.